TER3M4M
Projet 2, Activité 3 : Servomoteurs, moteurs à courant continu et moteurs pas-à-pas
Objectif
- Comprendre les différences concrètes entre les servomoteurs, les moteurs à courant continu et les moteurs pas-à-pas.
- Apprendre à contrôler ces moteurs avec un microcontrôleur.
Servomoteurs
Introduction aux servomoteurs
Consultez la vidéo d’introduction suivante :
🚧 à ajouter
Activité
Matériel
- 1 servomoteur 9g
- 1 servomoteur Parallax à rotation continue
- 1 bras de servomoteur (pour voir la position/le mouvement)
- 3 fils de raccordement
- 1 carte Arduino Uno
- 1 fil USB pour relier la carte à l’ordinateur
Schéma
Connectez le servomoteur à la carte Arduino Uno selon le schéma suivant :
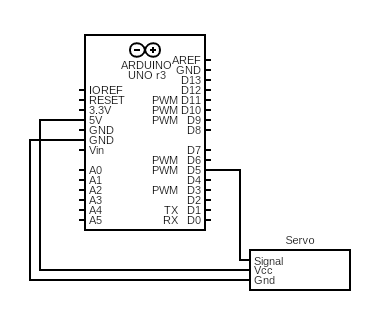
Testez un servomoteur à la fois en utilisant les mêmes branchements. Commencez par le servomoteur 9g.
Instructions
- Ouvrir l’exemple servo-test dans votre environnement de développement Arduino.
- Version Arduino IDE : servo-test.ino
- Version PlatformIO : servo-test-pio.zip
- Masquer tout le code actif dans
setup()(après la connexion du servomoteur) et dansloop()derrière un commentaire (sélectionner le code et appuyer surCtrl+épour commenter/décommenter). - Ajouter une seule commande
stopMotor()danssetup(). Quand la position du bras s’immobilise, attachez le bras au servomoteur afin qu’il soit parallèle au corps du servomoteur. - Démasquer le code original et ajustez les valeurs pour les signaux
LEFTetRIGHTpour que le bras de servomoteur soit à 90°, 0° (limite de rotation anithoraire) et 180° (limite de rotation horaire) respectivement. - Filmez le comportment du servomoteur.
- Répétez les étapes 2 à 5 pour le servomoteur Parallax à rotation continue mais avec les ajustements suivants :
- Si le moteur n’est pas immobile avec la commande
stopMotor()à l’étape 3, utiliser un tournevis pour ajuster le potentiomètre sur le servomoteur (la vis jaune) jusqu’à ce qu’il s’immobilise. Cela calibre le moteur correctement. - Les valeurs de
LEFTetRIGHTne sont pas les mêmes que pour le servomoteur 9g. En fait, ils devraient se trouvent dans l’intervalle de 1300 à 1700. Ajustez-les pour que le moteur soit immobile à 1500 et tourne dans une direction à 1300 et dans l’autre direction à 1700.
- Si le moteur n’est pas immobile avec la commande
Moteurs à courant continu
Introduction aux moteurs à courant continu et à la puce L9110H
Activité
🚧 Suivre ces instructions :
tiré du manuel pour notre trousse de pièces
Obtenir le code ici : Activité 13 sur la page GitHub d’UCTronics
Matériel
Schéma
Instructions
Moteurs pas-à-pas
Introduction aux moteurs pas-à-pas et au module de contrôle ULN2003
Activité
🚧 Suivre ces instructions :
tiré du manuel pour notre trousse de pièces
Obtenir le code ici : Activité 14 sur la page GitHub d’UCTronics